Naponta olvasunk róluk, évek óta prognosztizálják, hogy hamarosan megjelennek az utakon, komoly jövőt, a városi és általában a forgalom racionalizálását jósolják nekik, a fenntartható fejlődés egyik fontos elemét látják bennük, de tesztjárművek és korlátozott időiintervallumban és szigorúan "beszabályozott" kert- és külvárosi utakon közlekedő arizonai, texasi és kaliforniai taxik kivételével, teljesen autonóm, önvezető autók nem jelentek még meg az utakon.
Egy önvezető jármű emberi beavatkozás nélkül működik, érzékeli a környezetét. Nem szükséges, hogy benne ülő személy irányítsa, sőt, optimális esetben nem is kell, hogy üljön benne valaki. Bárhova mehet, ahova egy hagyományos jármű el tud menni, és megtesz mindent, amire egy gyakorlott humán sofőr képes.
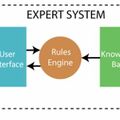
A szoftver eredményes működéséhez szenzorok, aktuátorok, komplex algoritmusok, gépitanulás-rendszerek és nagyteljesítményű processzorok kellenek. Különböző részein elhelyezett érzékelők adatai alapján, a jármű térképet készít környezetéről, amelyet folyamatosan frissít. A közeli járművek pozícióját radarok figyelik, a jelzőlámpák, táblák kezelését, más járművek és a gyalogosok figyelését videokamerák végzik. A távolságok mérése, az útszélek és a sávok azonosítása lidar feladata, a kerekek ultrahangos érzékelői pedig parkoláskor észlelik a szegélyeket, más járműveket.
Ezeket az inputokat szoftver dolgozza fel, majd útvonalat tervez, utasításokat ad a gyorsulásért, fékezésért és a kormány irányításáért felelős aktuátoroknak. A szoftvert kódolt szabályok, akadálykerülő algoritmusok, objektumfelismerő technikák támogatják a közlekedési szabályok betartásában, akadályok közötti eligazodásban.
A teljesen manuális nulladiktól a teljesen autonómig, a járművezetés egymásra épülő hat szintje különböztethető meg. Előrejelzések alapján 2030-ig az autók értékesítésének tíz százalékát a hármas típusú autonóm járművek tehetik ki. Jelenleg a második szintnél fejlettebbeket – főként biztonsági, és nem feltétlenül technikai okokból – még nem gyártanak nagy mennyiségben, úgyhogy a prognózisok merésznek is tűnhetnek.
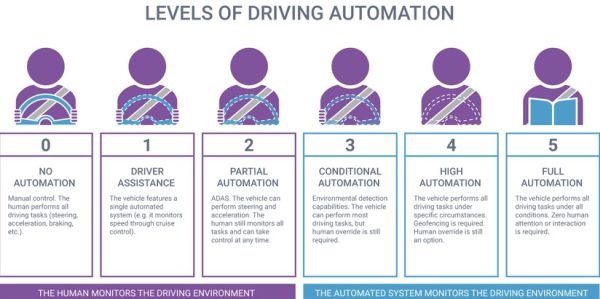
A mai járművek zöme a nulladik szinten tart, ember vezeti őket, gépi rendszerek, például az autonómiának nem nevezhető vészhelyzeti fékek ugyan segítik, de mindent ő tesz.
Az első az automatizálás legalacsonyabb szintje, a vezetőt egyetlen, például a kormány használatát és a gyorsítást, az autó többi járműtől való biztonságos távolban tartását segítő rendszer támogatja.
A második a kormányt és a gyorsítást/lassítást egyaránt kontrolláló fejlett asszisztens-rendszer. A vezetői székben ember ül, és bármikor átveheti a jármű feletti teljes irányítást.
A technológiailag nagyon fontos, emberi nézőpontból viszont alig értékelhető ugrásnak számító harmadik a feltételes autonómia. A jármű érzékeli a környezetet, megalapozott döntéseket tud hozni, például felgyorsít egy lassan haladó autó mellett. Emberi kontrollra, döntései esetleges felülírására mégis szüksége van. Ha a rendszer ugyanis elhibáz valamit, a vezetőnek minden pillanatban készen kell állnia a beavatkozásra.
Az ötödik – azaz negyedik – a magas szintű automatizálás annyiban különbözik az előzőtől, hogy rendszerhiba esetén a jármű is beavatkozhat, legtöbb esetben viszont nincs szükség emberi cselekvésre. Egy személy azonban még mindig beavatkozhat manuálisan, módjában áll felülírni a gép döntéseit. Az Alphabet, a kanadai Magna, a francia NAVYA, a Volvo és a Baidu próbálkozik ezzel a szinttel, az eddigi leglátványosabb sikereket a Waymo (Alphabet, azaz Google) érte el.
A teljes autonómia a tényleges ember nélküli vezetés; ezekben az autókban kormánykerék, fék- és gázpedálok sincsenek. Világszerte tesztelnek már párat.
Beszámolók alapján a jelenlegi önvezető autók fizikai biztonsági megoldásai (biztonsági övek, légzsákok, blokkolásgátló fékek stb.) sokkal fejlettebbek, mint a digitálisak. Még nincsenek teljesen felkészülve, hogy az online világban abszolút megbízhatóan működjenek. A cyberbiztonság nincs megnyugtatóan megoldva, bármikor elképzelhető hackertámadás.
Több jövőkép alapján, az önvezető járművek egyik legfőbb haszonélvezői az ingázók lehetnek. Többedmagukkal utazhatnak majd ugyanazon a megosztott járművön, és közben változatos tevékenységeket folytathatnak. Mindaddig viszont nyilvánvalóan nem cserélik le a vonat-, busz- stb. utat, amíg azok nagyobb biztonságot jelentenek.
Addig technológiai, szabályozási, környezeti és filozófiai problémákat kell megoldani, kérdéseket megnyugtató módon megválaszolni. Többek között a lidarokon és a radarokon bőven akad még finomítanivaló, az időjárás és a közlekedési feltételek, útviszonyok is bezavarhatnak, és a szabályozás sem egyértelmű, például, hogy ki a felelős önvezető járművek okozta balesetekért. Végül a mesterséges és az emberi intelligencia közötti különbségeket is figyelembe kell venni – egy humán vezető szemkontaktus alapján olvassa a gyalogosok arckifejezését, érti a testbeszédet, s mindezek alapján a pillanat törtrésze alatt hoz döntést. Egy önvezető autó mikor lesz képes erre, bele kódolható-e ugyanaz az életmentő ösztön, ami mindannyiunkban megvan.
Ha minden a tervek szerint megy, és az önvezető járművek széles körben elterjednek, használatuk számos előnnyel jár majd. Kevesebb lesz a dugó, csökkennek a szállítási költségek, javulnak a munka- és életkörülmények, rengeteg parkolóhely szabadul fel, 2050-re világviszonylatban 80 százalékkal kevesebb lehet a károsanyag-kibocsátás. Persze csak akkor, ha minden a tervek szerint megy, de egyelőre túl sok a nem kalkulált kellemetlenség, amelyek jelentősen hátráltathatják a technológia mainstreammé válását.
Már ha valaha is mainstreammé válik.
Frissítve: 2025. május 21.